Exercice 6 : clignotement de 2 leds (révision/découverte de la fonction millis)
Objectif : faire clignoter 2 led à 2 fréquences différentes : 1Hz et 0,5 Hz
Voici le chronogramme du fonctionnement que l'on veut obtenir: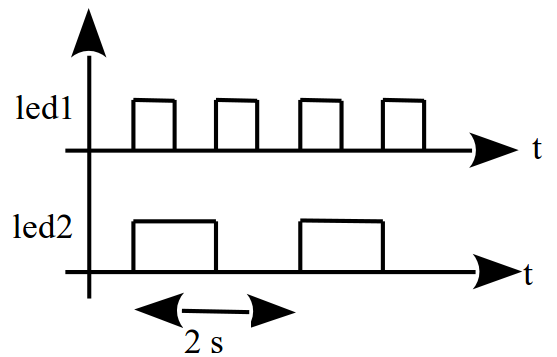
Le programme proposé :
// définition des variables
const int nombre_Pins = 3; // ……………………………..
const int ledPin1 = 13; // the LED pins
const int ledPin2= 12; // the LED pins
int interval1 = 500; // ……………….
int interval2 = 1000; // ……………….
void setup()
{
pinMode(ledPin1, OUTPUT);
pinMode(ledPin2, OUTPUT);
}
void loop()
{
digitalWrite(ledPin1,HIGH);
delay(interval1);
digitalWrite(ledPin1,LOW);
delay(interval1);
digitalWrite(ledPin2,HIGH);
delay(interval2);
digitalWrite(ledPin2,LOW);
delay(interval2);
}
1. Faire l'algorithme (sous forme d'algorigrammes) du programme
2. Le programme ne donne pas le résultat espéré. Faire le chronogramme de l'état des leds que génère ce programme.
On se propose maintenant d'essayer une autre version du programme:
Données techniques :
unsigned long : Unsigned long variables are extended size variables for number storage, and store 32 bits. Unlike standard longs unsigned longs won't store negative numbers, making their range from 0 to 4294967295
boolean : A boolean holds one of two values, true or false. (Each boolean variable occupies one byte of memory.)
Millis()
Returns the number of milliseconds since the Arduino board began running the current program. This number will overflow (go back to zero), after approximately 50 days.
Exemple: variable (type unsigned long) = millis()
Programme :
// définition des variables
const int nombre_Pins = 3; // ……………………………..
const int ledPin1 = 13; // the LED pins
const int ledPin2= 12; // the LED pins
int interval1 = 500; // ……………….
int interval2 = 1000; // ……………….
boolean etat_led1= LOW;
boolean etat_led2= LOW;
unsigned long temps1, temps2;
void setup()
{
pinMode(ledPin1, OUTPUT);
pinMode(ledPin2, OUTPUT);
temps1= millis();
temps2= millis();
}
void loop()
{
// gestion
if (millis()-temps1>499)
{
temps1=millis();
if (etat_led1==LOW)
{
etat_led1=HIGH;
}
else etat_led1=LOW;
}
if (millis()-temps2>999)
{
temps2=millis();
if (etat_led2==LOW)
{
etat_led2=HIGH;
}
else etat_led2=LOW;
}
// actions
if (etat_led1==LOW)
{
digitalWrite(ledPin1,LOW);
}
else digitalWrite(ledPin1,HIGH);
if (etat_led2==LOW)
{
digitalWrite(ledPin2,LOW);
}
else digitalWrite(ledPin2,HIGH);
}
3. Faire l'algorithme (sous forme d'algorigrammes) du programme
4. Expliquez, en détail, le fonctionnement du programme puis complétez les cases vises du tableau suivant concernant la led1 :
|
Temps donné par millis() |
temps1 |
Millis()-temps1 |
Etat_led1 |
Action ou commentaire |
|
0 |
0 (dans le setup) |
0 |
0 |
Démarrage du prog |
|
1 |
0 |
1 |
0 |
rien |
|
….. |
0 |
…... |
0 |
rien |
|
499 |
rien |
|||
|
500 |
|
|||
|
500 |
Mémorisation du temps |
|||
|
501 |
||||
|
502 |
||||
|
…... |
……. |
|||
|
999 |
||||
|
1000 |
|
|||
|
|
||||
|
1001 |
||||
|
1002 |
||||
|
…. |
5. Le programme fonctionne-t-il correctement par rapport à ce qui était demandé ?
Exercice 7 : allumage de plusieurs leds et boutons poussoirs
Rappel technique : la durée d'un cycle Arduino (temps d’exécution du programme et de lecture/écriture des entrées/sorties) est beaucoup plus court que la durée d'appui sur un bouton poussoir (entre 0,5 et 2 secondes). Bref l'appui sur un BP est vu plusieurs fois par la boucle "LOOP" du programme.
Soit le programme Arduino suivant :
// déclaration des variables, broches (pin)
const int btn_moins = 2;
const int btn_plus = 3;
const int led_0 = 10;
const int led_1 = 11;
const int led_2 = 12;
const int led_3 = 13;
int nombre_led = 0; // le nombre qui sera incrémenté et décrémenté
int etat_bouton; //lecture de l'état des boutons (un seul à la fois donc une variable suffit)
int memoire_plus = HIGH; //état appuyé par défaut
int memoire_moins = HIGH;
void setup()
{
pinMode(btn_plus, INPUT);
pinMode(btn_moins, INPUT);
pinMode(led_0, OUTPUT);
pinMode(led_1, OUTPUT);
pinMode(led_2, OUTPUT);
pinMode(led_3, OUTPUT);
}
void loop()
{
etat_bouton = digitalRead(btn_plus); // lecture de l'état du bouton d'incrémentation etat_
//Si le bouton a un état différent que celui enregistré ET que cet état est "appuyé"
if ((etat_bouton != memoire_plus) && (etat_bouton == LOW))
{
nombre_led++; //on incrémente la variable qui indique combien de LED à allumer
}
memoire_plus = etat_bouton; //on enregistre l'état du bouton pour le tour suivant
etat_bouton = digitalRead(btn_moins); //lecture de son état
//Si le bouton a un état différent que celui enregistré ET que cet état est "appuyé"
if((etat_bouton != memoire_moins) && (etat_bouton == LOW))
{
nombre_led--; //on décrémente la valeur de nombre_led
}
memoire_moins = etat_bouton; //on enregistre l'état du bouton pour le tour suivant
//on applique des limites au nombre pour ne pas dépasser 4 ou passer sous 0
if(nombre_led > 4)
{
nombre_led = 4;
}
if(nombre_led < 0)
{
nombre_led = 0;
}
//on éteint toutes les leds
digitalWrite(led_0, LOW);
digitalWrite(led_1, LOW);
digitalWrite(led_2, LOW);
digitalWrite(led_3, LOW);
}
//Puis on les allume une à une
if( nombre_led >= 1)
{
digitalWrite(led_0, HIGH);
}
if( nombre_led >= 2)
{
digitalWrite(led_1, HIGH);
}
if( nombre_led >= 3)
{
digitalWrite(led_2, HIGH);
}
if( nombre_led >= 4)
{
digitalWrite(led_3, HIGH);
}
} // fin du loop
1. Faire l'algorithme (sous forme d'algorigrammes) du programme
2. Expliquez, en détail, ce que va faire le programme et comment il le fait.
Exercice 8 : réalisation du programme de gestion d'un capteur
Nous allons lire un capteur de pression à l'aide d'une carte Arduino. Celui-ci est branché sur une entrée de la carte Arduino (voir schéma).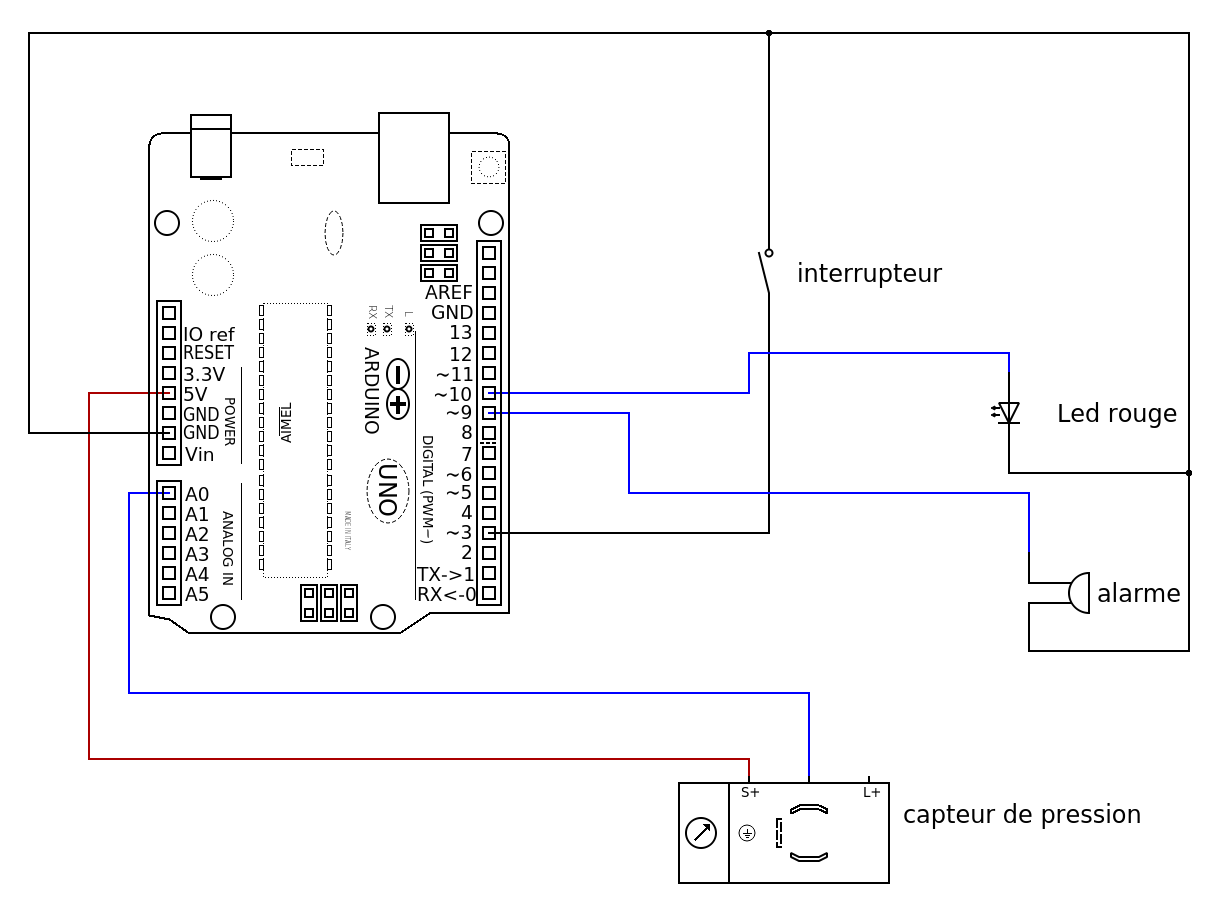
Nom des variables à utiliser dans le programme :
- capteur_press (lecture du capteur)
- press_volt (conversion en volts de la valeur du capteur)
- pression (résultat du calcul en hPa de la pression mesurée)
Analyse de la documentation arduino :
1. Quelles sont les valeurs possibles (plage de valeurs en volts) sur une entrée analogique de la carte Aruino Uno ?
2. Sur combien de bits fonctionne le convertisseur A/N des entrées analogiques ? Combien de valeurs différentes possibles pouvons-nous donc obtenir sur une entrée analogique ?
Application à notre capteur de pression :
3. En vous aidant du câblage, faites le programme Arduino afin de lire le capteur de pression, seulement quand l'interrupteur en activé (la led sera allumée). Vous devez utiliser la variable "capteur_press" qui contiendra la lecture de l'entrée analogique (pensez à définit le type de cette variable).
4. Modifiez le programme pour que celui-ci calcule la valeur en volt (à partir de la lecture du capteur que vous avez mis dans la variable "capteur_press"). Vous mettrez votre résultat dans la variable "press_volt" (celle-ci permettra, à la question suivante, de calculer la pression mesurée à partir de cette valeur en volts).
La courbe P=f(U) caractéristique du capteur est la suivante :
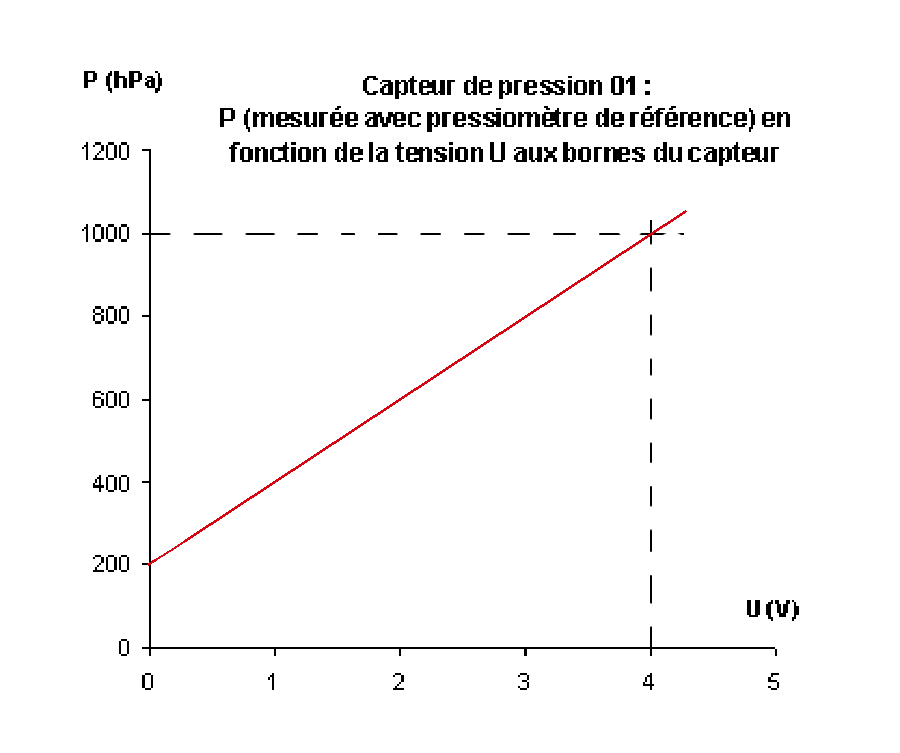
On remarque qu'il s'agit d'une fonction affine (forme y=ax+b). Il est alors facile de trouver a et b à partir de 2 points tirés de la courbe (le point correspondant à x=0 et un point quelconque par exemple).
5. Vous allez maintenant modifier le programme Arduino pour que la variable "pression" contienne, après le calcul que vous devez tirer de la courbe précédente, la valeur de la pression en hPa.
6. Vous allez maintenant modifier le programme arduino pour que le buzzer (alarme) soit activé quand la pression est supérieure à 850 hPa.
Exercice 9 : réalisation du programme de gestion d'un capteur de courant et lecture d'une tension
L'objectif de notre réalisation est de récupérer la tension et le courant fourni par un panneau solaire photovoltaïque (constitué de 2 cellules de 12V câblées en série).
Le schéma sera le suivant :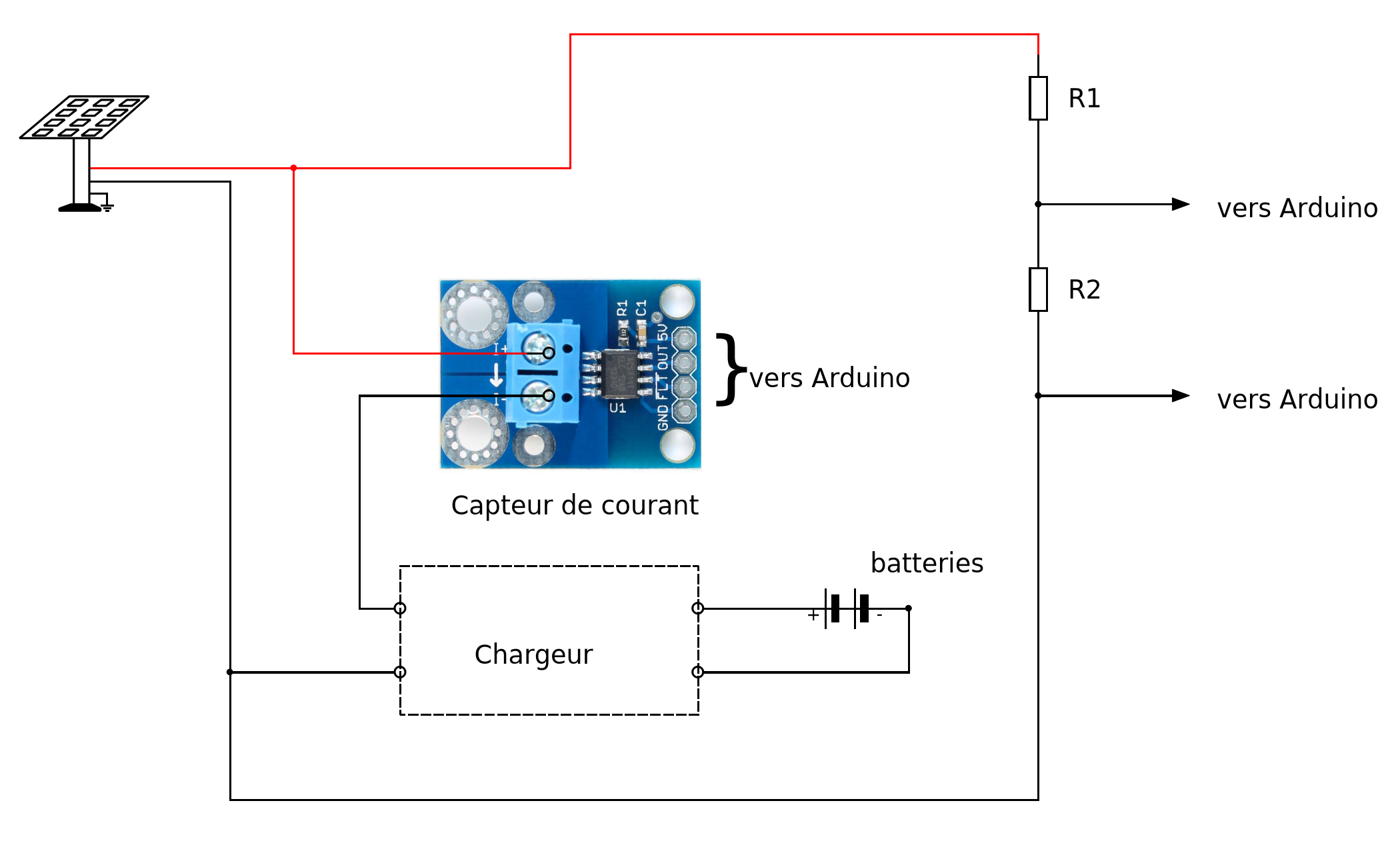
Nom des variables à utiliser dans le programme :
- capteur_courant (lecture du capteur)
- courant_volt (conversion en volts de la valeur du capteur)
- courant (résultat du calcul en Ampères du courant électrique mesuré)
- tension (valeur de la tension)
Partie 1 : gestion du capteur de courant
Données techniques :
- capteur linéaire
- alimentation 5VCC
- sortie : 0-5VCC
- plage de mesure: -12A à 12A
1. Quelle sera la valeur fournie par le capteur lorsque le courant vaudra -12A ?
2. Quelle sera la valeur fournie par le capteur lorsque le courant vaudra 12A ?
3. Quelle sera la valeur fournie par le capteur lorsque le courant vaudra 0A ?
4. Sachant que le capteur sera câblé sur l'entrée analogique A1, faites le programme Arduino afin de lire la valeur du capteur de courant.
Partie 2 : gestion de la mesure de tension
La carte Arduino ne peut pas lire la tension de 24VCC fournie par le panneau solaire. Nous allons utiliser le montage "pont diviseur" pour diminuer cette tension :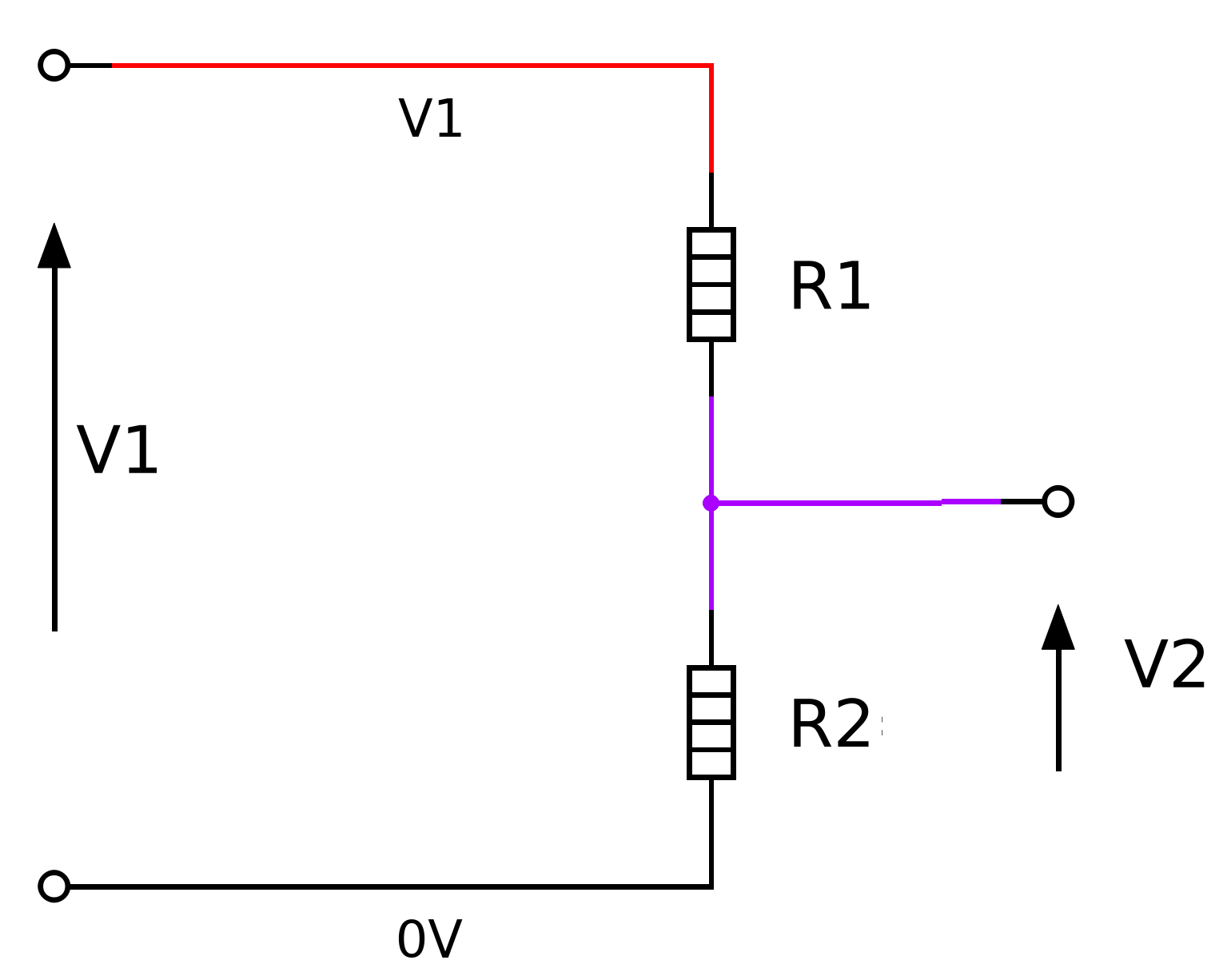
5. Retrouvez (démontrez) la formule liant la tension V2 à la tension V1 (utilisez la loi des mailles pour trouver le courant I puis la loi d'Ohm pour trouver V2. La formule ne doit dépendre que de V1, R1 et R2).
6. On a choisi R1=6,6kΩ. En déduire la valeur de R2 pour obtenir 5V (sur V2) quand V1 vaut 24V.
7. A partir de votre formule, complétez le tableau suivant :
|
V1 (volts) |
24 |
18 |
10 |
5 |
0 |
|
V2 (volts) |
8. Sachant que c'est l'entrée analogique A0 qui est utilisée, faites le programme Arduino afin de lire la valeur de cette tension.
Exercice 10 : réalisation du programme de calcul de la vitesse d'un cycliste
|
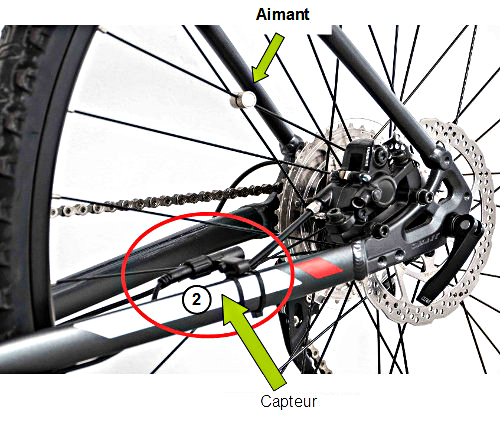
Le vélo dispose d'un capteur (aimant+capteur), placé sur la roue (26 pouce = 665 mm de diamètre avec le pneu).
|
 |
Nom des variables à utiliser dans le programme :
- etat_BP (lecture du BP RAZ)
- distance_km (distance parcourue en km)
- vitesse_kmh (vitesse en km/h)
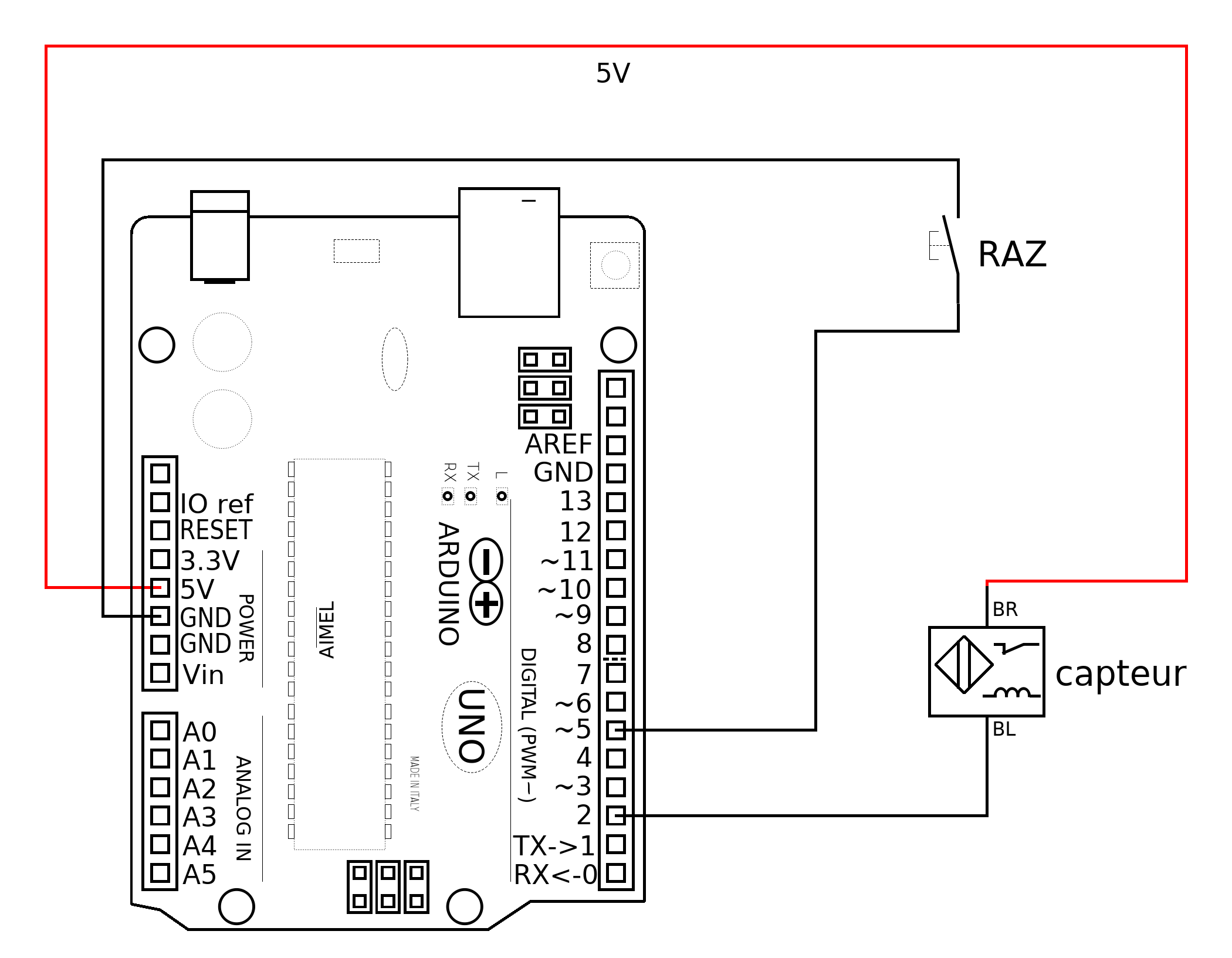
1. En vous aidant du câblage, faites le programme Arduino afin de lire l'état du capteur et de calculer la distance parcourue. La distance est remise à zéro par l'appui sur le bouton poussoir RAZ. Attention : quand le capteur est activé (à "1" logique) on ne compte qu'une seule impulsion (à base vitesse une impulsion dure plusieurs cycles du programme Arduino).
2. Rajoutez le calcul de la vitesse (faire le calcul toutes les 15 secondes en utilisant la fonction Millis).
3. Calculez le nombre d'impulsion par seconde que reçoit la carte Arduino si le vélo roule à 40 km/h. Quel est le risque s'il les impulsions sont trop rapides ?
Exercice 11 : réalisation d'un automatisme séquentiel à l'aide du langage C (Arduino)
Équipement d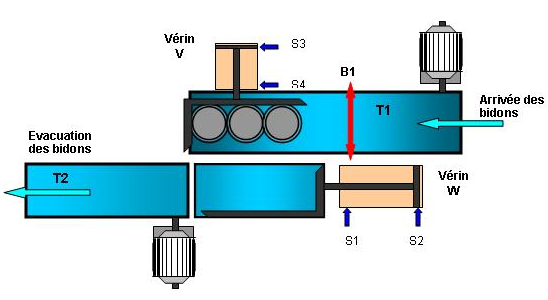 ’emballage de bidons, schéma vu de dessus →
’emballage de bidons, schéma vu de dessus →
L’équipement est utilisé pour former des lots de 3 bidons.
La détection des bidons est assurée par un capteur photo-électrique "B1".
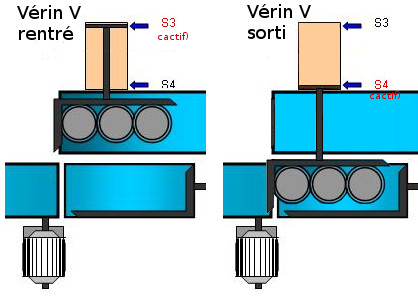
Fonctionnement d'un vérin : un vérin est un élément pneumatique (ou hydraulique) qui permet un déplacement (il peux pousser, tirer, …). Chaque vérin dispose ici de 2 capteurs TOR (Tout Ou Rien) indiquant la position de celui-ci (rentré ou sorti).
Exemple des 2 positions possibles du vérin V (capteurs S3 et S4):
Tableaux des capteurs et actionneurs:
|
capteurs |
désignation |
Câblage Arduino (N° de pin) |
actionneurs |
désignation |
Câblage Arduino (N° de pin) |
|
DCY |
BP de départ du cycle |
0 |
T1 |
Marche tapis T1 |
10 |
|
AT |
BP d’arrêt du cycle |
1 |
T2 |
Marche tapis T2 |
11 |
|
B1 |
Actif lorsque 3 bidons sont présents |
2 |
V+ |
Sortie du vérin V |
12 |
|
S1 |
Vérin W sorti |
3 |
V- |
Rentrée du vérin V |
13 |
|
S2 |
Vérin W rentré |
4 |
W+ |
Sortie du vérin W |
14 |
|
S3 |
Vérin V rentré |
5 |
W- |
Rentrée du vérin W |
15 |
|
S4 |
Vérin V sorti |
6 |
Description du fonctionnement :
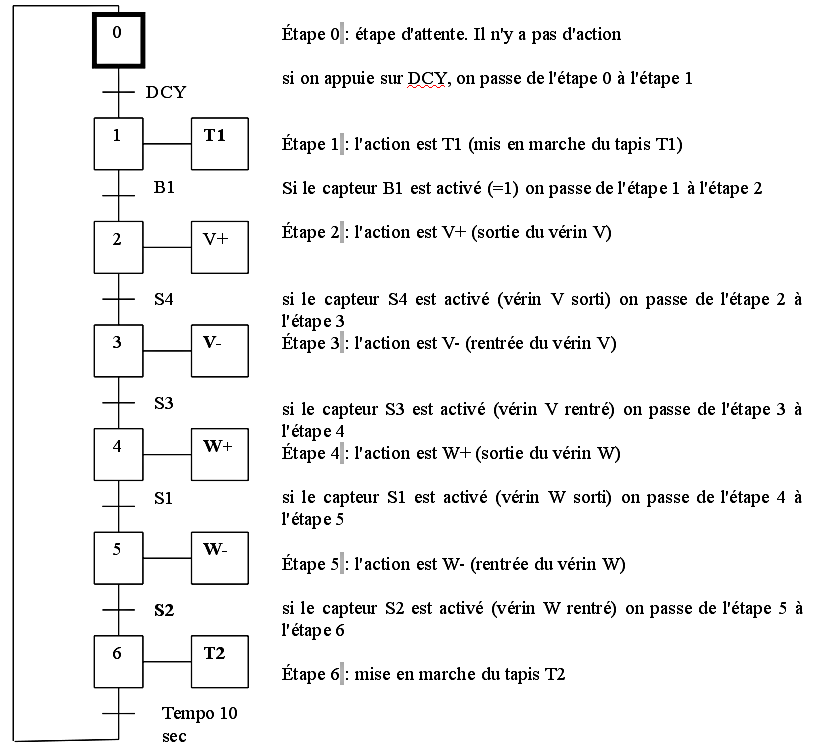
Une impulsion sur le bouton poussoir DCY permet le démarrage de l’équipement. On met en marche le tapis T1 et les bidons arrivent par le tapis T1 et sont acheminés devant le vérin V. Lorsque le nombre est atteint (capteur B1 actif), le tapis s’arrête et le transfert des bidons s’effectue par les différents vérins (on sort le vérin V puis on le rentre puis on sort le vérin W puis on le rentre. A chaque action on vérifie l’état du capteur associé à l’action du vérin. Lorsque les bidons sont arrivés sur le tapis T2 on met en route celui 10 secondes. Ensuite le cycle recommence.
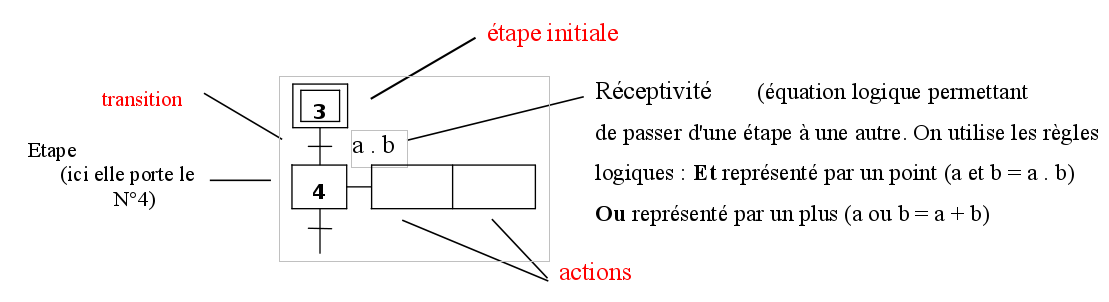
Ce genre de système est dit séquentiel (les actions s'enchainent les unes après les autres). Pour les automaticiens il existe un système de programmation prévu spécialement pour ça. Cela s'appelle le GRAFCET.
Il est composé:
- d'étapes auxquelles sont associées des actions.
- de transitions auxquelles sont associées des réceptivités.
- de liaisons orientés entre les étapes et les transitions (du haut vers le bas en général).
Voilà le résultat du grafcet (avec explications à droite de celui-ci):
La difficulté va être d'adapter quelque chose de séquentiel à un programme informatique !
La solution proposée (il en existe d'autres bien sûr) est de créer une variable « etape » qui aura comme valeur le numéro de l'étape de notre automatisme. Ainsi si « etape » vaut 3, on est dans l'étape 3 (avec comme action V-).
Voici la proposition de programme Arduino (Mega):
//**** debut du programme *********//
// définition des pins
#define dcy_pin 0
#define at_pin 1
#define b1_pin 2
#define s1_pin 3
#define s2_pin 4
#define s3_pin 5
#define s4_pin 6
#define t1_pin 10
#define t2_pin 11
#define vplus_pin 12
#define vmoins_pin 13
#define wplus_pin 14
#define wmoins_pin 15
// declaration des variables
boolean dcy,at, b1, s1, s2, s3, s4;
int etape=0;
unsigned long temps1;
void setup() {
// affectation des pins
pinMode(dcy_pin, INPUT); // definition de l'entree dcy //
digitalWrite(dcy_pin, HIGH) ; // activation du pullup de la broche en entrée
pinMode(at_pin, INPUT); // definition de l'entree at //
digitalWrite(at_pin, HIGH) ; // activation du pullup de la broche en entrée
pinMode(b1_pin, INPUT); // definition de l'entree b1 //
pinMode(s1_pin, INPUT); // definition de l'entree s1 //
pinMode(s2_pin, INPUT); // definition de l'entree s2 //
pinMode(s3_pin, INPUT); // definition de l'entree s3 //
pinMode(s4_pin, INPUT); // definition de l'entree s4 //
pinMode(t1_pin, OUTPUT); // definition de t1 en sortie //
pinMode(t2_pin, OUTPUT); // definition de t2 en sortie //
pinMode(vplus_pin, OUTPUT); // definition de vplus en sortie //
pinMode(vmoins_pin, OUTPUT); // definition de vmoins en sortie //
pinMode(wplus_pin, OUTPUT); // definition de wplus en sortie //
pinMode(wmoins_pin, OUTPUT); // definition de wmoins en sortie //
etape=0; //initialisation de l'automatisme
}
void loop(){
// lecture des entrées (boutons poussoirs et capteurs
dcy = digitalRead(dcy_pin); // lecture du bouton poussoir dcy//
at = digitalRead(at_pin); // lecture du bouton poussoir at//
b1 = digitalRead(b1_pin); // lecture du capteur b1//
s1 = digitalRead(s1_pin); // lecture du capteur s1//
s2 = digitalRead(s2_pin); // lecture du capteur s2//
s3 = digitalRead(s3_pin); // lecture du capteur s3//
s4 = digitalRead(s4_pin); // lecture du capteur s4//
// Gestion de la structure de l'automatisme (passage d'une étape à une autre)
if (etape==0 && dcy==HIGH)
{
etape=1;
}
if (etape==1 && b1==HIGH)
{
etape=2;
}
if (etape==2 && s4==HIGH)
{
etape=3;
}
if (etape==3 && s3==HIGH) etape=4;
if (etape==4 && s1==HIGH)
{
etape=5;
}
if (etape==5 && s2==HIGH)
{
etape=6;
temps1=millis(); // memorisation du temps à la validation de l'étape 6
}
if (etape==6 && (millis()-temps1)>10000) // attente de 10s
{
etape=0;
}
// gestion des sorties (actions)
if(etape==1)
{
digitalWrite(t1_pin, HIGH);
}
else
{
digitalWrite(t1_pin, LOW);
}
if(etape==2)
{
digitalWrite(vplus_pin, HIGH);
}
else
{
digitalWrite(vplus_pin, LOW);
}
if(etape==3)
{
digitalWrite(vmoins_pin, HIGH);
}
else
{
digitalWrite(vmoins_pin, LOW);
}
if(etape==4) digitalWrite(wplus_pin, HIGH);
else digitalWrite(wplus_pin, LOW);
if(etape==5)
{
digitalWrite(wmoins_pin, HIGH);
}
else
{
digitalWrite(wmoins_pin, LOW);
}
if(etape==6)
{
digitalWrite(t2_pin, HIGH);
}
else
{
digitalWrite(t2_pin, LOW);
}
} // fin de la boucle loop
1. Faire l'algorithme (sous forme d'algorigrammes) du programme
2. Expliquez, en détail, ce que va faire le programme et comment il le fait.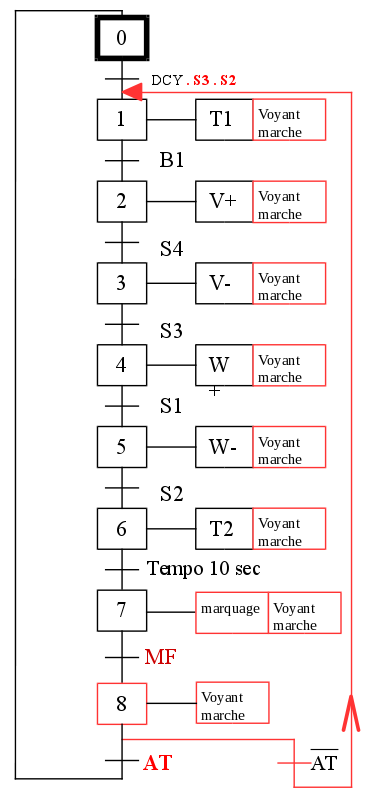 Suite à des essais, la machine et le grafcet sont modifiés. On rajoute la fonction marquage réalisée par un tampon qui écrit sur les 3 bidons en même temps. Un capteur indique quand le marquage est réalisé (MF). Une lampe est rajoutée pour indiquer que la machine est en marche.
Suite à des essais, la machine et le grafcet sont modifiés. On rajoute la fonction marquage réalisée par un tampon qui écrit sur les 3 bidons en même temps. Un capteur indique quand le marquage est réalisé (MF). Une lampe est rajoutée pour indiquer que la machine est en marche.
De plus à la fin du cycle il y a 2 possibilités : soit on appuie sur AT et le cycle s’arrête (on va à l'étape 0), soit on n’appuie pas sur AT et le cycle recommence (on va à l'étape 1).
Capteurs et actionneurs rajoutés :
|
capteurs |
désignation |
Câblage Arduino (N° de pin) |
|
MF |
Marquage Fait |
7 |
|
actionneurs |
désignation |
Câblage Arduino (N° de pin) |
|
VM |
Voyant « marche » |
16 |
|
MARQ |
marquage |
17 |
3. Modifiez le programme Arduino pour qu'il réalise le grafcet modifié ci-contre: