- Bac STI 2D
- I2D (1ère)
- MEO1.4: La bouteille en verre : étude du cycle de vie à travers divers scénarios
- Mise en situation
- Étape 1: découverte de la méthode (scénario simplifié)
- Étape 2 : le tri sélectif
- Étape 3 : amélioration de la précision des calculs
- Étape 4 : la consigne, une alternative au recyclage
- Étape 5: tentative de construction d’un scénario réaliste à court terme
- Étape 6: imaginons un scénario idéal et …. réaliste
- S1 : révisions
- D2.1 : lecture de plans architectural
- D2.2: schématisation électrique 1
- D2.3: liaisons cinématiques (découverte)
- MEO 2.2: schéma cinématique
- MEO 2.3 Le schéma pneumatique
- S2 : révisions
- D3.1: chaîne de puissance
- D3.2: portail SET
- D3.3: l'énergie thermique
- D3.4: Voiture Radio commandée
- MEO 3.2: Zoe vs Clio
- MEO 3.3 La Nano Centrale
- S3 : révisions
- MOE 4.1 : Dimensionnement de structures
- MEO 4.2: les frottements - N°2
- S4 : révisions
- D5.1: caractérisation de l'analogique
- D5.2 : binaire et numération
- D5.3 : logique combinatoire
- D5.4: les capteurs
- MEO 5.1 : la Conversion Analogique Numérique
- MEO 5.2 : la conversion numérique - analogique
- MEO 5.3: Filtrage
- MEO 5.4 : la stéganographie
- S5 : révisions
- S6: présentation
- D6.1: outils de représentation d’un programme
- D6.2: matériel de traitement de l'information
- D6.3: Flowcode
- MEO 6.1 : découverte de la programmation informatique
- MEO 6.2: Réalisation d'une page Web en HTML
- S6 : révisions
- Partie 1 : révision des structures algorithmiques
- Partie 1 (suite) : révision des structures algorithmiques
- Partie 2 : création d'algorithmes ou d'algorigrammes
- Partie 3 : matériel de traitement de l'information
- Partie 4 : révision de la programmation (structures algorithmiques, variables, …) à partir de programmes Arduino
- Partie 5: HTML
- QCM (test des connaissances)
- MEO1.4: La bouteille en verre : étude du cycle de vie à travers divers scénarios
- 2I2D (terminale)
- TP de terminale STI2D - SIN
- Thème N°1 / Environnement de prototypage Arduino
- Thème N°2 / réseaux et communication informatique
- AP2.1 : Réseaux informatiques
- Présentation du logiciel
- I. Un premier petit réseau
- II. Le suivi des trames / le mode simulation
- III. Petit point "matériels"
- IV. Paramétrage d'un routeur
- V. Le masque de sous réseau
- VI. Réseau avec concentrateurs (hubs) et commutateurs (switchs)
- VII. Deux réseaux interconnectés avec un routeur
- VIII. Configuration automatique des adresses IP (DHCP)
- IX. Gestion des DNS (Domain Name System)
- X. Gestion de VLANs (réseaux virtuels)
- XI. Réseau de notre "pépinière d'entreprises"
- XII. En bonus : paramétrage d'un réseau plus complexe
- AP2.2 : Serveur linux
- AP2.3: trames et communication (Wireshark)
- Thème N°2: bilan & exercices de révision
- AP2.1 : Réseaux informatiques
- Thème N°3: programmation informatique (Python)
- Thème N°4 / Environnement web
- Thème N°5: traitement du signal
- Thème N°6 / Application mobile (IHM)
- Bonus TP Term SIN
- Cours de Terminale STI2D - SIN
- Thème N°1: L’environnement de prototypage Arduino
- Thème N°2 : réseaux et communications informatiques
- I. Introduction
- II. Réseaux informatiques: 1. Principes généraux
- II. Réseaux informatiques: 2. Éléments d'un réseau
- II. Réseaux informatiques: 3. Adresses des éléments d’un réseau
- II. Réseaux informatiques: 4. Le modèle de référence OSI
- II. Réseaux informatiques: 5. Comparaison des modèles OSI et TCP/IP
- II. Réseaux informatiques: 6. Principe de l'adressage et de l'encapsulation
- II. Réseaux informatiques: 7. Topologie des réseaux
- III. Communications informatiques: 1. Les supports de transmission
- III. Communications informatiques: 2. Exemple N°1 : la liaison série (RS232 et Arduino)
- III. Communications informatiques: 3. Exemple N°2 : le bus I2C
- IV. Exercices
- Thème N° 5 : Traitement du signal
- Partie I : le filtrage
- II. Exemple et calculs pour un filtre passe-bas (1er ordre)
- III. Exemple d’un filtre passe-haut
- IV. Exemple d’un filtre passe-bande
- V. Exemple filtre coupe-bande (ou réjecteur de bande)
- VI. Exercices
- VII. Petite vidéo qui résume
- Partie II : amplification (transistor)
- II. Symboles et constitution du transistor bipolaire
- III. Fonctionnement en amplification
- IV. Fonctionnement en commutation
- V. Types de boîtiers
- VI. Puissance
- VII. Les autres types de transistor
- VIII. Exercices
- Le stockage numérique (bonus)
- 2I2D - SIN - révisions
- Spécificité Energie Environnement (TP)
- Série N°1
- Série N°2
- Série N°3
- Les mesures électriques
- Les mini projet en EE 2019
- 2I2D: Enseignement spécifique Energie Environnement
- Convertisseur binaire/decimal/hexa
- Travail sur mon choix de spécificité pour la terminale
- Projets (terminales)
- Fiches d'aide (arduino et projet)
- Echanges européen
- La poursuite d'étude pour les SIN
- Portes ouvertes
- Sources
TP 4.1: Régulation de vitesse du E-Solex
Fichier Word: TP 4.1
I. Introduction
Dans ce TP, Nous allons plutôt travailler sur un scooter plutôt que le E-Solex.Il permet d'aborder les notions de régulation de façon plus cohérente au vu de ses performances
Le scoot'elec est un scooter électrique qui reprends le châssis d'un zenith, bien que ce scooter soit lourd (115 kg à vide), il est très maniable grâce à un centre de gravité très bas.
Dans cette activité, nous allons étudier la régulation de vitesse de ce scooter.
 |
II. Etude de la chaine de puissance du scoot'élec
A partir du document technique du Scoot élec DT Scootelec, répondez aux questions suivantes. Donner le nom et si possible la valeur numérique de la grandeur demandée
a- Donner les caractéristiques des batteries du scoot'elec
b-Donner le type de modulateur d'énergie
c-Donner le type de moteur
d-Quelle conversion effectue ce moteur
e-Donner le rapport de réduction de l'ensemble poulie motrice 9, courroie 10 et poulie réceptrice 7.
f- Donner le rapport de réduction de l'ensemble arbre primaire 4 et roue de sortie 6.
g-Donner le rapport entre la la vitesse du scooter (m/s) et la vitesse de rotation de la roue arrière du scooter (tr/min).
h-Compléter le synoptique suivant en partant des batteries et en finissant par la vitesse du scooter.
 |
III. Etude de la régulation de vitesse
a-Ouvrir le fichier suivant : Scooter.psimsch
b-Replacer le nom de chaque élément à côté de son symbole en vous aidant de l'étude faite en II
c-Faire un double clic sur l ’élément poulies-courroie et remplir la ligne gear ratio avec la valeur calculée dans la question 1-e
d-Faire de même avec l'élément roues dentées avec la valeur trouvée dans la question 1-f..
e-Réaliser un synoptique de la boucle de régulation de vitesse du scoot'elec
f-Lancer une simulation ( Aller voir comment ici) et en mesurant la vitesse maximale du scooter, dire si on est en France ou en Suisse.
g-Quel élément faut-il modifier pour respecter la réglementation de l'autre pays concernant la vitesse maximale ?
h-Modifier cet élément et lancer une simulation pour vérifier votre réponse.
IV. Etude du régulateur
a-Donner le type et la valeur du correcteur.
b-Lancer 3 simulation pour des valeurs de 3, 10 et 50. Relever l'évolution de la vitesse, la puissance moteur et de la distance
c-Avec ce type de correcteur atteint-on exactement la valeur désirée ?
-si oui, donner les temps de réponse à 5% pour les 3 cas précédents.
-si non, donner l'erreur statique pour les 3 cas précédents.
d- A partir de ces valeurs et également de l'évolution de la puissance moteur, analyser l'influence du paramètre Proportionnel
e-Modifier le correcteur K pour un correcteur PI :
e-Faire un double clic sur l ’élément PI et remplir la ligne gain avec 3 et la ligne time constant avec 1
f-Lancer une simulation et conclure sur l'effet du nouveau correcteur (stabilité, rapidité tr5% et précision).
g-Vérifier les performances du scooter (accélération pour 100m et 10m)
V. Effets d'une perturbation (optionnel)
On va voir l'effet d'une côte sur les performances du scooter.
On va rajouter la perturbation dans la simulation :
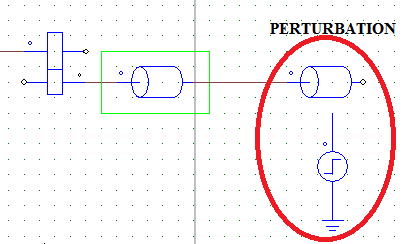 |
a-Choisir une charge mécanique contrôlée dans la barre d'outil Éléments ==> Power ==> Mecanical loads and sensors ==> Mecanical load (ext. controlled) et la placer à droite de la charge
b-Choisir la fonction Step :
Faire un double clic sur l ’élément Step et remplir la ligne Vstep avec 100 et Tstep avec 30, ensuite la placer sous la charge contrôlée.
c-Placer la masse sous l'élément Step.
d-Lancer une simulation et conclure sur l'effet de la perturbation (stabilité, rapidité tr5% et précision).
e-Quelle est la tension moteur avant la montée ? Donner le rapport cyclique du hacheur
f-Quelle est la tension moteur après ? Donner le rapport cyclique du hacheur