- Bac STI 2D
- I2D (1ère)
- MEO1.4: La bouteille en verre : étude du cycle de vie à travers divers scénarios
- Mise en situation
- Étape 1: découverte de la méthode (scénario simplifié)
- Étape 2 : le tri sélectif
- Étape 3 : amélioration de la précision des calculs
- Étape 4 : la consigne, une alternative au recyclage
- Étape 5: tentative de construction d’un scénario réaliste à court terme
- Étape 6: imaginons un scénario idéal et …. réaliste
- S1 : révisions
- D2.1 : lecture de plans architectural
- D2.2: schématisation électrique 1
- D2.3: liaisons cinématiques (découverte)
- MEO 2.2: schéma cinématique
- MEO 2.3 Le schéma pneumatique
- S2 : révisions
- D3.1: chaîne de puissance
- D3.2: portail SET
- D3.3: l'énergie thermique
- D3.4: Voiture Radio commandée
- MEO 3.2: Zoe vs Clio
- MEO 3.3 La Nano Centrale
- S3 : révisions
- MOE 4.3 : Descente de charges
- S4 : révisions
- D5.1: caractérisation de l'analogique
- D5.2 : binaire et numération
- D5.3 : logique combinatoire
- D5.4: les capteurs
- MEO 5.1 : la Conversion Analogique Numérique
- MEO 5.2 : la conversion numérique - analogique
- MEO 5.3: Filtrage
- MEO 5.4 : la stéganographie
- S5 : révisions
- S6: présentation
- D6.1: outils de représentation d’un programme
- D6.2: matériel de traitement de l'information
- D6.3: Flowcode
- MEO 6.1 : découverte de la programmation informatique
- MEO 6.2: Réalisation d'une page Web en HTML
- S6 : révisions
- Partie 1 : révision des structures algorithmiques
- Partie 1 (suite) : révision des structures algorithmiques
- Partie 2 : création d'algorithmes ou d'algorigrammes
- Partie 3 : matériel de traitement de l'information
- Partie 4 : révision de la programmation (structures algorithmiques, variables, …) à partir de programmes Arduino
- Partie 5: HTML
- QCM (test des connaissances)
- MEO1.4: La bouteille en verre : étude du cycle de vie à travers divers scénarios
- Travail sur mon choix de spécificité pour la terminale
- 2I2D (terminale)
- TP de terminale STI2D - SIN
- Thème N°1 / Environnement de prototypage Arduino
- Thème N°2 / réseaux et communication informatique
- AP2.1 : Réseaux informatiques
- Présentation du logiciel
- I. Un premier petit réseau
- II. Le suivi des trames / le mode simulation
- III. Petit point "matériels"
- IV. Paramétrage d'un routeur
- V. Le masque de sous réseau
- VI. Réseau avec concentrateurs (hubs) et commutateurs (switchs)
- VII. Deux réseaux interconnectés avec un routeur
- VIII. Configuration automatique des adresses IP (DHCP)
- IX. Gestion des DNS (Domain Name System)
- X. Gestion de VLANs (réseaux virtuels)
- XI. Réseau de notre "pépinière d'entreprises"
- XII. En bonus : paramétrage d'un réseau plus complexe
- AP2.2 : Serveur linux
- AP2.3: trames et communication (Wireshark)
- Thème N°2: bilan & exercices de révision
- AP2.1 : Réseaux informatiques
- Thème N°3: programmation informatique (Python)
- Thème N°4 / Environnement web
- Thème N°5: traitement du signal
- Thème N°6 / Application mobile (IHM)
- Bonus TP Term SIN
- Cours de Terminale STI2D - SIN
- Thème N°1: L’environnement de prototypage Arduino
- Thème N°2 : réseaux et communications informatiques
- I. Introduction
- II. Réseaux informatiques: 1. Principes généraux
- II. Réseaux informatiques: 2. Éléments d'un réseau
- II. Réseaux informatiques: 3. Adresses des éléments d’un réseau
- II. Réseaux informatiques: 4. Le modèle de référence OSI
- II. Réseaux informatiques: 5. Comparaison des modèles OSI et TCP/IP
- II. Réseaux informatiques: 6. Principe de l'adressage et de l'encapsulation
- II. Réseaux informatiques: 7. Topologie des réseaux
- III. Communications informatiques: 1. Les supports de transmission
- III. Communications informatiques: 2. Exemple N°1 : la liaison série (RS232 et Arduino)
- III. Communications informatiques: 3. Exemple N°2 : le bus I2C
- IV. Exercices
- Thème N° 5 : Traitement du signal
- Partie I : le filtrage
- II. Exemple et calculs pour un filtre passe-bas (1er ordre)
- III. Exemple d’un filtre passe-haut
- IV. Exemple d’un filtre passe-bande
- V. Exemple filtre coupe-bande (ou réjecteur de bande)
- VI. Exercices
- VII. Petite vidéo qui résume
- Partie II : amplification (transistor)
- II. Symboles et constitution du transistor bipolaire
- III. Fonctionnement en amplification
- IV. Fonctionnement en commutation
- V. Types de boîtiers
- VI. Puissance
- VII. Les autres types de transistor
- VIII. Exercices
- Le stockage numérique (bonus)
- 2I2D - SIN - révisions
- 2I2D: Enseignement spécifique Energie Environnement
- Spécificité Energie Environnement (TP)
- Série N°1
- Pépinière d'entreprise à Neuville sur Saône
- La cafetière électrique
- Série N°2
- Série N°3
- Les mesures électriques
- Les mini projet en EE 2019
- Série N°1
- Projets (terminales)
- Convertisseur binaire/decimal/hexa
- Fiches d'aide (arduino et projet)
- Echanges européen
- La poursuite d'étude pour les SIN
- Portes ouvertes
- Sources
B. Système chaine de remplissage
1- Cahier des charges :
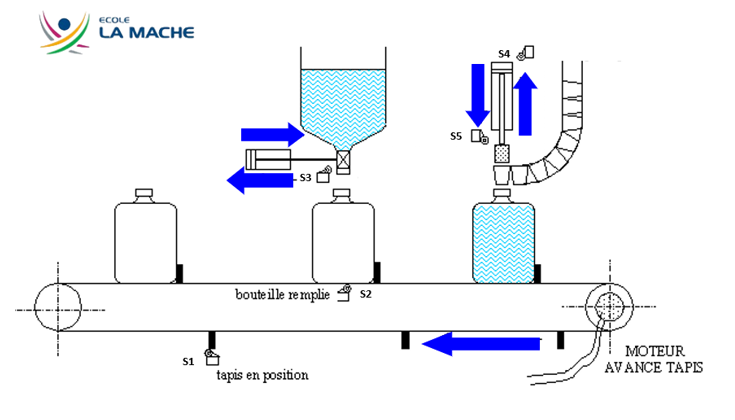
En condition initiale, le voyant H1 est allumé.
L’appui sur dcy déclenche l’avancé du tapis s’il y a présence d’une pièce jusqu’à ce que le capteur S1 détecte à nouveau une dent du tapis roulant. Ensuite, le remplissage d’une bouteille et le bouchage d’une autre sont simultanément effectuées.
Remplissage d’une bouteille : Le remplissage se fait par soutirage, un vérin ouvre une vanne d’un silo jusqu’à ce qu’il ne soit plus détecté par S3, le produit se dépose à l’intérieur de la bouteille. Un capteur « bouteille remplie (S2) » permet de contrôler le niveau de remplissage de façon satisfaisante. Une fois la bouteille remplie, le vérin ferme alors la vanne du silo jusqu’à être de nouveau détecté par S3.
Bouchage d’une bouteille : Le bouchage est assuré par un vérin presseur. Le vérin sort jusqu’à ce que le bouchon soit enfoncé correctement (S5), puis il remonte jusqu’en position initiale (S4).
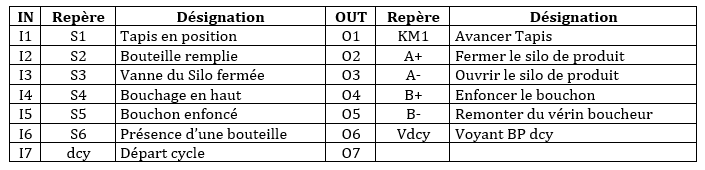
2- Affectation Entrée / Sortie automate :
3- Options :
- Un signal sonore devra retentir pendant deux secondes s’il n’y a pas de bouteille lors de l’appui sur dcy, en logique soft.
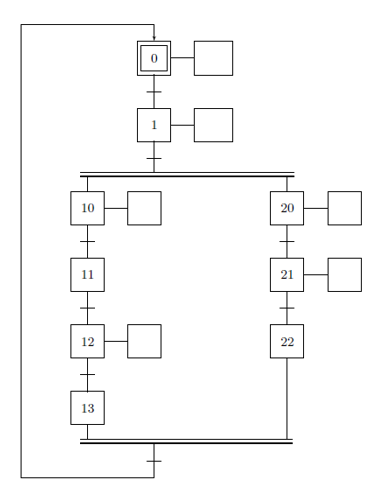
4- Programmation en grafcet du remplissage de bouteille :
- Compléter le grafcet suivant et faite contrôler.
- Programmer le grafcet ci-contre avec le logiciel Zelio et essayer la simulation
- Faire contrôler par le professeur et faire l’essai groupe par groupe sur la maquette.
- Sur le grafcet et sur la simulation précédant rajouter les options du cahier des charges.
- Essayer et faire valider par le professeur