Partie 1: La régulation
I. Amélioration des performances de la chaîne d’information
Equipés de capteurs, de systèmes intelligents de mesure, de contrôle et de régulation, les systèmes mécatroniques actuels (machines, véhicules, robots) s’adaptent automatiquement aux situations et réagissent rapidement, ce qui leur permet notamment d’optimiser leur consommation d’énergie
II. Exemple d’utilisation au quotidien
Dans de nombreuses applications industrielles ou domestiques, il faut maintenir à des valeurs déterminées des grandeurs physiques (vitesse, position, température, éclairement, vitesse etc.) quelles que soient les perturbations qui peuvent influer sur ces grandeurs.
| Exemple 1 : la température d’un local doit être maintenue à une valeur spécifiée (consigne) quelle que soit la température extérieure | 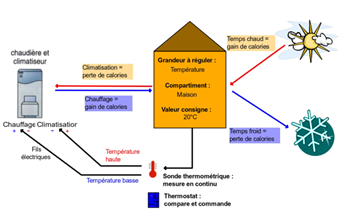 |
- Exemple 2 : la fréquence de rotation du moteur d’entraînement d’un monte-charge doit rester constante quelle que soit la charge à lever.
Il est alors nécessaire de comparer en permanence la grandeur d’exploitation (température du local ou fréquence de rotation) à la grandeur souhaitée que l’on appelle généralement consigne.
De tels automatismes disposent d’une commande dite en boucle fermée. Cette commande a pour fonction de contrôler la bonne exécution de l’ordre, c’est à dire de s’assurer que le signal réponse correspond bien au signal d’entrée.
Tout dispositif automatisé dans lequel la grandeur de sortie s’aligne rigoureusement sur la grandeur de consigne est dit système à commande en boucle fermée ou système asservi.
III. Régulation et asservissement
Dans les systèmes bouclés, on prend en compte l’état réel de la sortie que l’on compare à la valeur souhaitée (consigne) pour ajuster la commande de l’actionneur.
On parle de régulation si la consigne est constante et que le système compense les perturbations (évènements extérieurs qui interviennent dans le système). On parle d’asservissement si la consigne est variable et que le système la suit le plus rapidement et le plus précisément possible.
Exercice : Régulation ou asservissement?
- Régulateur de vitesse de voiture
- Tracker solaire (panneau photovoltaïque qui suit la position du soleil)
- Positionnement d’un robot par joystick
- Contrôle de chauffage d’une maison
- Positionnement du curseur avec ma souris de PC
IV. Systèmes bouclés
|
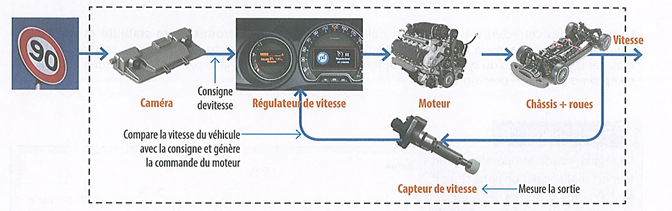
4.1 Régulateur de vitesse intelligent: ce système permet de réguler la vitesse d’un véhicule grâce à la reconnaissance de panneaux et de limitations de vitesse à l’aide de la caméra embarquée |
 |
La régulation de vitesse intelligente peut se représenter par le schéma de principe suivant
La régulation de vitesse intelligente peut être représentée sous la forme d’un schéma bloc
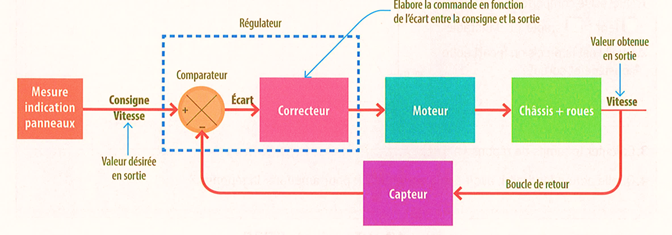
4.2 Structure de la commande – schéma bloc
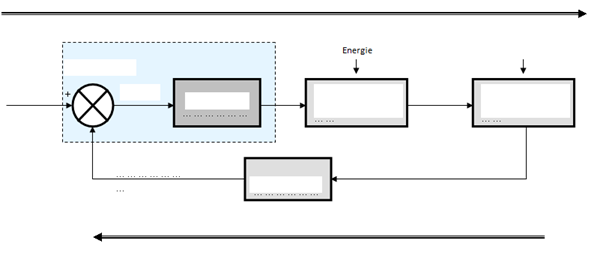
Le schéma fonctionnel d’une commande en boucle fermée comporte :
- Une chaîne directe ou chaîne d’action: elle est constituée par un correcteur, un amplificateur et un actionneur. La chaîne d’action est une chaîne de puissance. Elle permet de corriger les effets d’une perturbation sur le système
- Une Chaîne de réaction ou chaîne inverse : encore appelée boucle de rétroaction, elle surveille en permanence l’état de la sortie pour informer le régulateur (comparateur + correcteur) des modifications à apporter sur la chaîne directe. Elle se compose du capteur de mesure et du transmetteur.
- Le comparateur : il élabore le signal d’erreur qui permet au correcteur d’agir sur la chaîne d’action.
- Le régulateur : Il élabore un signal de commande à partir de l’écart entre la consigne et la mesure. C’est l’organe « intelligent ».
- Le pré-actionneur : Il maîtrise la puissance à fournir à l’actionneur dans le processus à partir du signal issu du régulateur. C’est lui qui module l’énergie reçue du système.
- L’actionneur : Il convertit cette puissance en une autre puissance utile par le processus ; C’est le muscle du système.
- Le capteur : Il donne une image de la grandeur asservie et en rend compte au régulateur
V. Les régulateurs :
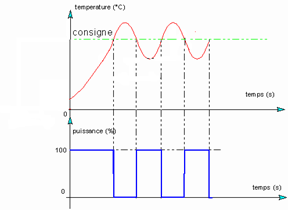
5.1 Ballon d’eau chaude électrique
Le chauffage de l’eau est assuré par une résistance électrique. Un thermostat permet de régler la température maximale de l’eau. La production d’ECS peut être instantanée ou à accumulation
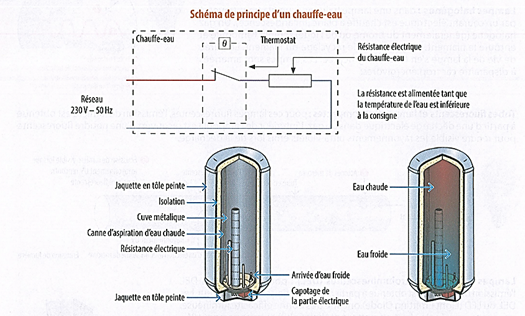
Dans ce cas, le thermostat a la fonction de REGULATEUR
a. Compléter le chronogramme ci-dessous, en indiquant les périodes de chauffe de la résistance aussi que sa valeur (en % de la puissance totale de la résistance P= RI²)
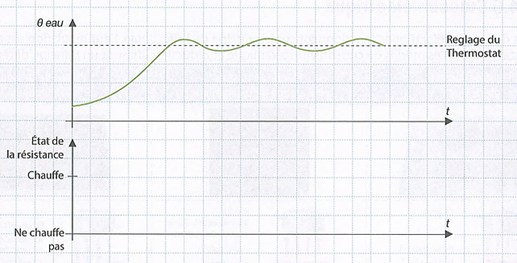
b. Pourquoi l’eau continue-t-elle à chauffer alors que l’alimentation de la résistance est coupée ?
c. Comment peut-on décrire le fonctionnement du régulateur ?
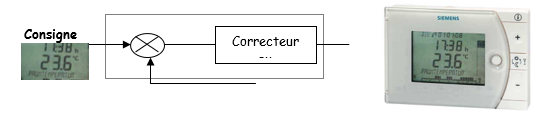
5.2 Les régulateurs
Le régulateur est composé de plusieurs fonctions :
- Comparaison de la valeur souhaitée et de la valeur obtenue
- Correction des défauts du système : cette partie est paramétrable et sera étudié par la suite.
a. La régulation Tout ou Rien :
Encore couramment utilisé dans les systèmes de chauffage, dans les fours domestiques, les sécurités de surpression ou de niveau, ils sont d’une technologie très simple ; il s’agit typiquement du thermostat bilame. Il est particulièrement bien adapté lorsque l’actionneur est aussi de type tout ou rien :
- Chauffage commandé par un contact ou relais.
- Electrovanne ouverte ou fermée.
- Ventilateur alimenté ou arrêté.
- Circuit de freinage de véhicule contrôlé par un ABS.
b. Les régulateurs industriels

c. Classification des régulateurs
Les régulateurs sont classés selon les critères exposés ci-dessous :
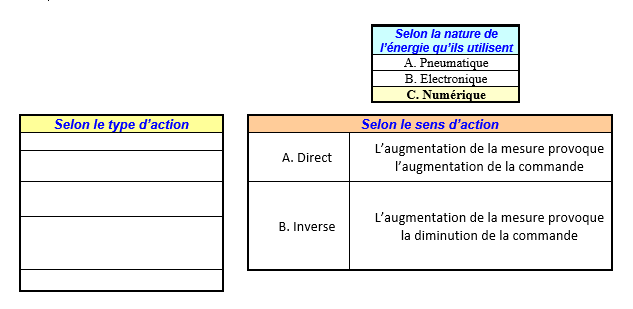
Le sens d’action est inversible et est choisi en fonction de celui de la vanne. Le sens de celle-ci est fixé en fonction des conditions de sécurité. Ainsi par exemple, une vanne de réglage d’un gaz combustible doit être fermée par manque d’air.
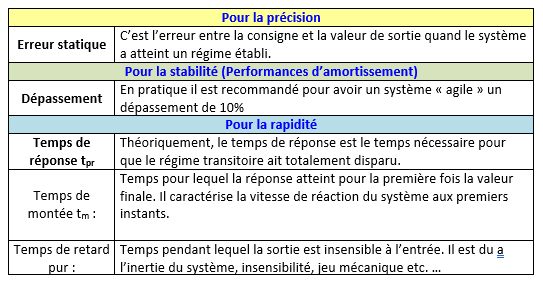
VI. Performance d’une régulation
On a toujours intérêt à trouver les bons réglages des paramètres d’une régulation pour des raisons :
- D’économie d’énergie
- De confort d’utilisation
- De la durée de vie du matériel
Exemple : Intérêt d’une bonne régulation du chauffage
 |
 |
|
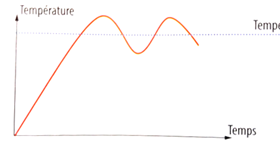
Mauvaise régulation : La température intérieure n’est pas stable, le confort thermique n’est pas bon. On a la sensation de température fluctuante |
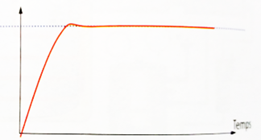
Bonne régulation : La température intérieure est stable, le confort thermique est agréable. |
Ces réglages restent difficiles à trouver et peuvent être différents d’une situation à une autre pour un même élément
Par exemple : Le réglage de régulation de position d’un ascenseur à l’approche du palier sera différent si on se trouve dans une résidence étudiante ou une EPAD
On va agir sur 3 critères qui sont :
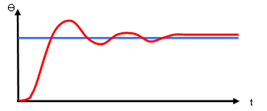
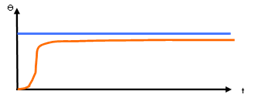
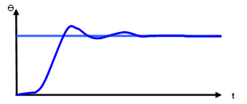
- La stabilité
- La précision
- La rapidité
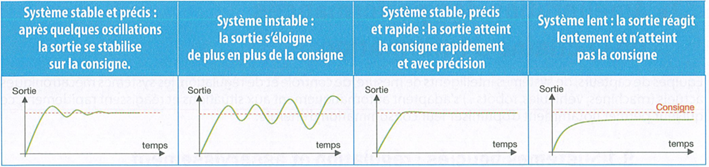
Exercice d’application :
Sur ces 3 exemples, identifiez le critère le plus dominant. Par comparaison des 3 relevés, décrivez ce que vous constatez
 |
 |
 |
VII. Paramètre d’une régulation
7.1 Réponse indicielle :
Soit la mesure d’une grandeur régulée répondant à une variation de la consigne XC
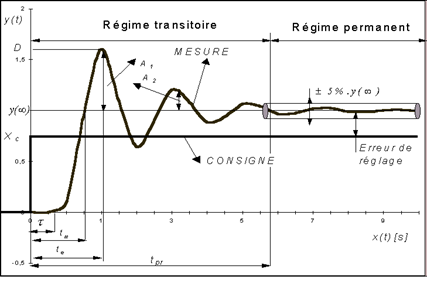
7.2 Grandeurs prise en compte pour définir la performance de la régulation
Sur le relevé, on mesure différentes valeurs nous permettant de définir la performance du système de régulation
A partir de cette analyse, on peut agir sur les autres paramètres pour apporter des corrections
Les grandeurs mesurées sont les suivantes
7.3 Paramètres de réglages des régulateurs
TOR (tout ou rien)
Un régulateur « tout ou rien » est un régulateur qui élabore une action de commande discontinue qui prend deux positions ou deux états 0 et 1 (ou 0 et 100%).
Action proportionnelle P
L'action Proportionnelle permet de vaincre les grandes inerties du système.
(P= RAPIDITE)
Action intégrale I
L'action intégrale complète l'action proportionnelle. Elle permet d'éliminer l'erreur résiduelle en régime permanent. (I = PRECISION)
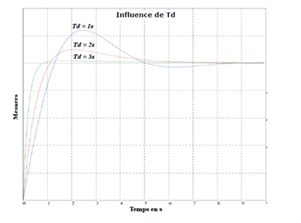
Action dérivée D
L'action Dérivée, en compensant les inerties dues au temps mort, accélère la réponse du système et améliore la stabilité de la boucle, en permettant notamment un amortissement rapide des oscillations dues à l'apparition d'une perturbation ou à une variation subite de la consigne. (D= STABILITE)
VIII. Exercice
Exercice 1 :
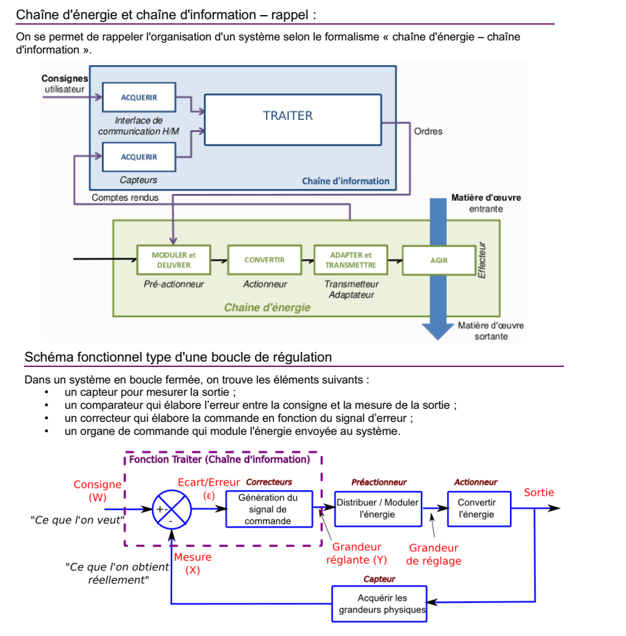
En vous aidant de la « chaine d’énergie et d’information », entourer sur le schéma fonctionnel :
- La chaine d’énergie en vert
- La chaine d’information en bleu
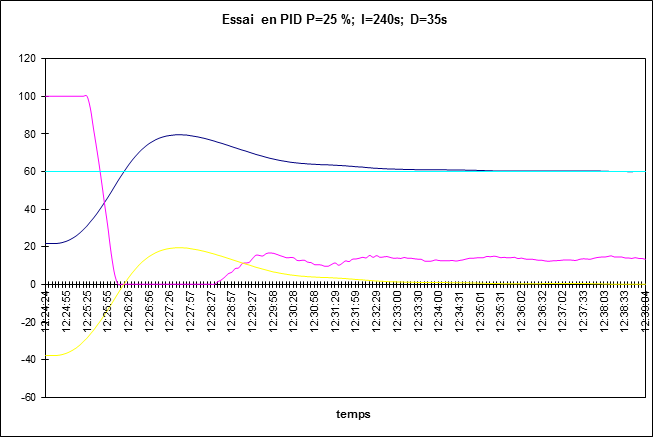
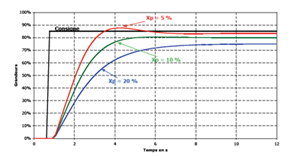
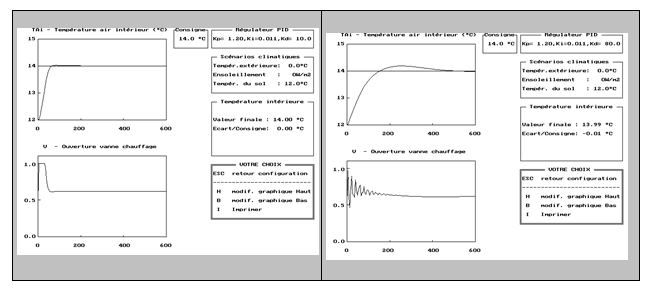
Exercice 2 : Le système de régulation de température a la structure suivante :
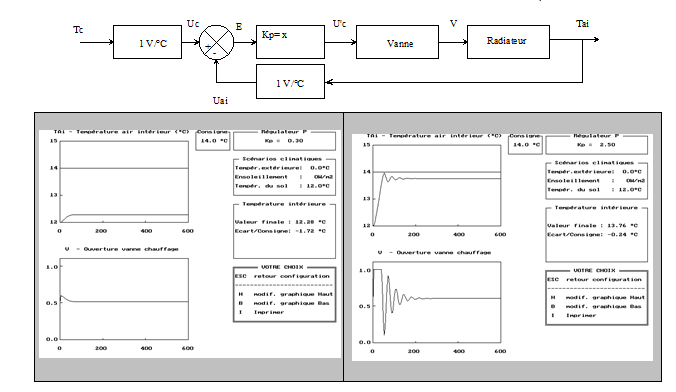
1) Quel est le paramètre modifié entre les deux essais ci-dessus ?
2) Quelle est l’influence de Kp sur l’erreur de statisme ? sur la stabilité du système ?
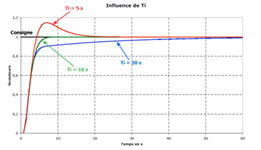
Avec de nouveaux réglages du régulateur :
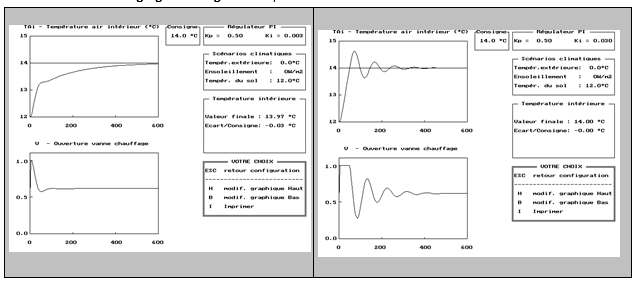
- 3) Quelle est l’influence de l’action intégrale sur l’erreur de statisme Es ?
- 4) Quelle différence voyez-vous entre les deux graphiques ?
- 5) Quel est le nom (sous forme d’abréviations ) de ce type de régulation ?
Encore de nouveaux réglages du régulateur :
- 6) Quelle est l’influence de l’action dérivée sur la stabilité du système ?
- 7) Quel est le nom (sous forme d’abréviations) de ce type de régulation ?
Exercice 3 : Soit la caractéristique ci-dessous :
1) Donnez la valeur de :
- L’erreur de statisme,
- Premier dépassement A1
- Temps de réponse TPR
- Temps de montée TM
- Retard pur.
2) Donnez la valeur de la puissance fournie par le système à la charge
(Échelle 100 correspond à 200 W)
3) Que pouvez-vous conclure de cet essai ? (Rapidité, précision, stabilité)