- Bac STI 2D
- I2D (1ère)
- MEO1.4: La bouteille en verre : étude du cycle de vie à travers divers scénarios
- Mise en situation
- Étape 1: découverte de la méthode (scénario simplifié)
- Étape 2 : le tri sélectif
- Étape 3 : amélioration de la précision des calculs
- Étape 4 : la consigne, une alternative au recyclage
- Étape 5: tentative de construction d’un scénario réaliste à court terme
- Étape 6: imaginons un scénario idéal et …. réaliste
- S1 : révisions
- D2.1 : lecture de plans architectural
- D2.2: schématisation électrique 1
- D2.3: liaisons cinématiques (découverte)
- MEO 2.2: schéma cinématique
- MEO 2.3 Le schéma pneumatique
- S2 : révisions
- D3.1: chaîne de puissance
- D3.2: portail SET
- D3.3: l'énergie thermique
- D3.4: Voiture Radio commandée
- MEO 3.2: Zoe vs Clio
- MEO 3.3 La Nano Centrale
- S3 : révisions
- MOE 4.3 : Descente de charges
- S4 : révisions
- D5.1: caractérisation de l'analogique
- D5.2 : binaire et numération
- D5.3 : logique combinatoire
- D5.4: les capteurs
- MEO 5.1 : la Conversion Analogique Numérique
- MEO 5.2 : la conversion numérique - analogique
- MEO 5.3: Filtrage
- MEO 5.4 : la stéganographie
- S5 : révisions
- S6: présentation
- D6.1: outils de représentation d’un programme
- D6.2: matériel de traitement de l'information
- D6.3: Flowcode
- MEO 6.1 : découverte de la programmation informatique
- MEO 6.2: Réalisation d'une page Web en HTML
- S6 : révisions
- Partie 1 : révision des structures algorithmiques
- Partie 1 (suite) : révision des structures algorithmiques
- Partie 2 : création d'algorithmes ou d'algorigrammes
- Partie 3 : matériel de traitement de l'information
- Partie 4 : révision de la programmation (structures algorithmiques, variables, …) à partir de programmes Arduino
- Partie 5: HTML
- QCM (test des connaissances)
- MEO1.4: La bouteille en verre : étude du cycle de vie à travers divers scénarios
- Travail sur mon choix de spécificité pour la terminale
- 2I2D (terminale)
- TP de terminale STI2D - SIN
- Thème N°1 / Environnement de prototypage Arduino
- Thème N°2 / réseaux et communication informatique
- AP2.1 : Réseaux informatiques
- Présentation du logiciel
- I. Un premier petit réseau
- II. Le suivi des trames / le mode simulation
- III. Petit point "matériels"
- IV. Paramétrage d'un routeur
- V. Le masque de sous réseau
- VI. Réseau avec concentrateurs (hubs) et commutateurs (switchs)
- VII. Deux réseaux interconnectés avec un routeur
- VIII. Configuration automatique des adresses IP (DHCP)
- IX. Gestion des DNS (Domain Name System)
- X. Gestion de VLANs (réseaux virtuels)
- XI. Réseau de notre "pépinière d'entreprises"
- XII. En bonus : paramétrage d'un réseau plus complexe
- AP2.2 : Serveur linux
- AP2.3: trames et communication (Wireshark)
- Thème N°2: bilan & exercices de révision
- AP2.1 : Réseaux informatiques
- Thème N°3: programmation informatique (Python)
- Thème N°4 / Environnement web
- Thème N°5: traitement du signal
- Thème N°6 / Application mobile (IHM)
- Bonus TP Term SIN
- Cours de Terminale STI2D - SIN
- Thème N°1: L’environnement de prototypage Arduino
- Thème N°2 : réseaux et communications informatiques
- I. Introduction
- II. Réseaux informatiques: 1. Principes généraux
- II. Réseaux informatiques: 2. Éléments d'un réseau
- II. Réseaux informatiques: 3. Adresses des éléments d’un réseau
- II. Réseaux informatiques: 4. Le modèle de référence OSI
- II. Réseaux informatiques: 5. Comparaison des modèles OSI et TCP/IP
- II. Réseaux informatiques: 6. Principe de l'adressage et de l'encapsulation
- II. Réseaux informatiques: 7. Topologie des réseaux
- III. Communications informatiques: 1. Les supports de transmission
- III. Communications informatiques: 2. Exemple N°1 : la liaison série (RS232 et Arduino)
- III. Communications informatiques: 3. Exemple N°2 : le bus I2C
- IV. Exercices
- Thème N° 5 : Traitement du signal
- Partie I : le filtrage
- II. Exemple et calculs pour un filtre passe-bas (1er ordre)
- III. Exemple d’un filtre passe-haut
- IV. Exemple d’un filtre passe-bande
- V. Exemple filtre coupe-bande (ou réjecteur de bande)
- VI. Exercices
- VII. Petite vidéo qui résume
- Partie II : amplification (transistor)
- II. Symboles et constitution du transistor bipolaire
- III. Fonctionnement en amplification
- IV. Fonctionnement en commutation
- V. Types de boîtiers
- VI. Puissance
- VII. Les autres types de transistor
- VIII. Exercices
- Le stockage numérique (bonus)
- 2I2D - SIN - révisions
- 2I2D: Enseignement spécifique Energie Environnement
- Spécificité Energie Environnement (TP)
- Série N°1
- Pépinière d'entreprise à Neuville sur Saône
- La cafetière électrique
- Série N°2
- Série N°3
- Les mesures électriques
- Les mini projet en EE 2019
- Série N°1
- Projets (terminales)
- Convertisseur binaire/decimal/hexa
- Fiches d'aide (arduino et projet)
- Echanges européen
- La poursuite d'étude pour les SIN
- Portes ouvertes
- Sources
I. Les microcontrôleurs
Généralités
Un microcontrôleur est un circuit intégré qui contient en interne, c’est-à-dire dans un seul et même boîtier, l’équivalent de la structure complète d’un micro-ordinateur. La figure montre quels sont ces éléments dont voici les fonctions:
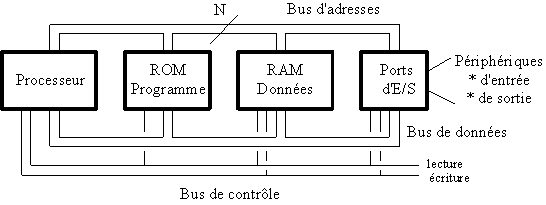
- l’unité centrale ou CPU (Central Processing Unit) ou processeur est le coeur du microcontrôleur. C’est l’équivalent du microprocesseur avec une puissance généralement moindre, la vocation n’étant pas la même. C’est cette unité centrale qui exécute le programme et pilote ainsi tous les autres éléments. Elle dispose généralement de deux connexions avec l’extérieur, une pour son horloge et une pour sa réinitialisation ou reset.
- La mémoire morte ou ROM (Read OnlyMemory) est une mémoire dont le contenu est conservé même en cas de coupure de courant. Elle contient le programme que va exécuter l’unité centrale. C’est donc elle en fait qui personnalise le circuit, puisque c’est elle qui définit sa fonction.
- La mémoire vive ou RAM (Random Access Memory) est une mémoire dans laquelle l’unité centrale peut lire et écrire à tout instant. Elle est utilisée dans les phases de calcul du programme, pour stocker des résultats intermédiaires, stocker les variables d’une application.
- Les entrées/sorties permettent au microcontrôleur de communiquer avec le monde extérieur. C’est donc là que vont être connectés les claviers, afficheurs, poussoir, moteurs, relais, etc. que va utiliser l’application.Tous ces éléments sont reliés entre eux par ce que l’on appelle un bus, c’est-à-dire un ensemble de liaisons transportant des adresses, des données et des signaux de contrôle.
Qu'est-ce qu'un PIC?
Un PIC est un microcontrôleur c'est à dire est une unité de traitement et d’exécution de programmes informatiques (comme un microprocesseur) à laquelle on a ajouté des périphériques internes permettant de réaliser des montages sans nécessiter l’ajout de composants annexes. Un microcontrôleur PIC peut donc fonctionner de façon autonome après programmation (sur notre carte arduino il y a un aussi microcontrôleur du même genre).
Les PIC intègrent une mémoire programme non volatile (FLASH), une mémoire de données volatile (SRAM), une mémoire de données non volatile (E2PROM ou EEPROM), des ports d'entrée-sortie (numériques ou T.O.R. , analogiques, MLI, UART, bus I2C, Timers, etc.), et même une horloge interne.
Important: les PIC possèdent souvent quelques entrées analogiques (on les repère en général avec les lettres AN, ANA, ANALOG, ...), entrées associées en interne avec un CAN (Convertisseur Analogique Numérique). Ils ont aussi des entrées/sorties T.O.R. (dites aussi "logiques" ou "binaires" ou "numériques") qui sont repérées parfois par des flèches indiquant leur rôle (entrée simple, sortie simple ou entrée/sortie dont le rôle est paramétrable informatiquement). Ces entrées/sorties T.O.R. sont parfois regroupées en "port" associées à une lettre (A, B, C, ...). Ainsi un port peut regrouper X entrées/sorties (port de X bits). Par exemple une broche notée PC1 ou RC1 signifie que l'on a affaire au 2ème élément ou bit (le premier étant 0) du port C.
Le PIC 16F84A
Nous allons maintenant travailler sur la documentation du PIC16F84A
Le PIC 32MX
Nous allons maintenant travailler sur la documentation du PIC32Mx